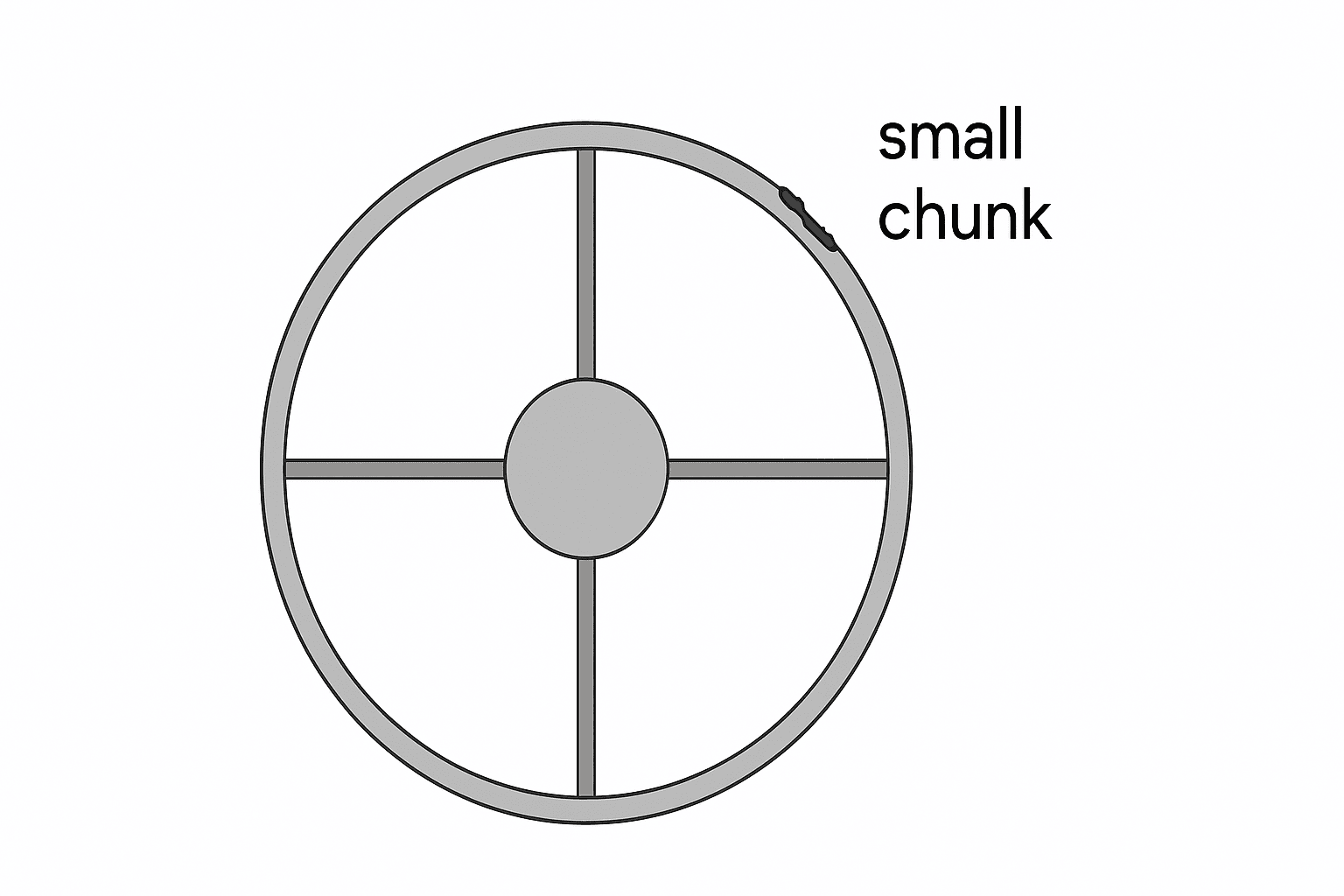
The object shown in the diagram below consists of a cylinder of mass \( 100 \) \( \text{kg} \) and radius \( 25.0 \) \( \text{cm} \) connected by four thin rods, each of mass \( 5.00 \) \( \text{kg} \) and length \( 0.75 \) \( \text{m} \), to a thin-outer ring of mass \( 20.0 \) \( \text{kg} \). A small chunk of metal of mass \( 1.00 \) \( \text{kg} \) is welded to the outer ring. Determine the moment of inertia of the entire assembly about the center of the inner cylinder, treating the metal chunk as a point mass. Hint: The moment of inertia of a disk about it center is \(\tfrac{1}{2} M R^2\), a thin rod about it center is \(\tfrac{1}{12}ML^2\), and a thin hoop about its center is \(I = MR^2\).
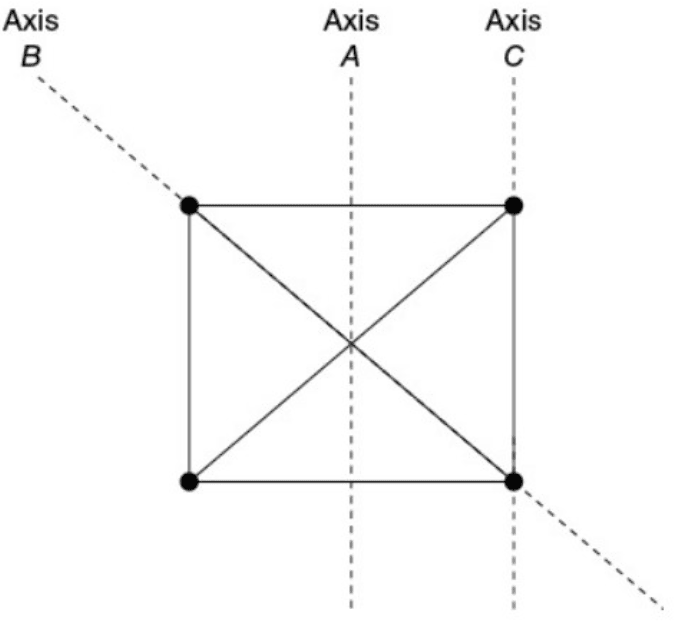
Four identical lead balls with large mass are connected by rigid but very light rods in the square configuration shown in the preceding figure. The balls are rotated about the three labeled axes. Which of the following correctly ranks the rotational inertia \(I\) of the balls about each axis?
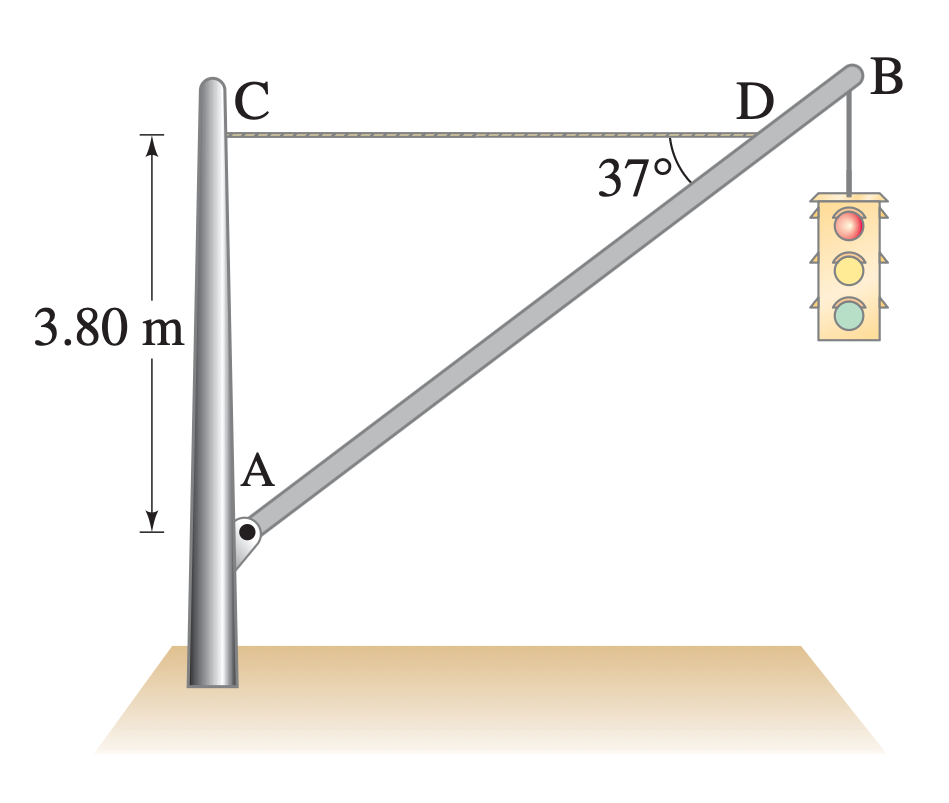
A traffic light hangs from a pole as shown in the diagram. The uniform aluminum pole AB is of length \( 7.20 \) \( \text{m} \) and has a mass of \( 12.0 \) \( \text{kg} \). The mass of the traffic light is \( 21.5 \) \( \text{kg} \). The point C is located \( 3.80 \) \( \text{m} \) vertically above the pivot A. A massless horizontal cable CD is attached at C and connects to the pole at point D, where the pole makes an angle of \( 37^{\circ} \) with the cable.



