
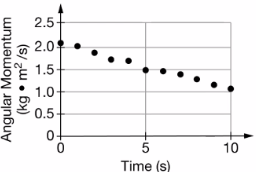
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.
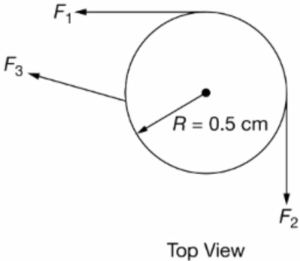
A disk of radius \( R = 0.5 \) \( \text{cm} \) rests on a flat, horizontal surface such that frictional forces are considered to be negligible. Three forces of unknown magnitude are exerted on the edge of the disk, as shown in the figure. Which of the following lists the essential measuring devices that, when used together, are needed to determine the change in angular momentum of the disk after a known time of \( 5.0 \) \( \text{s} \)?
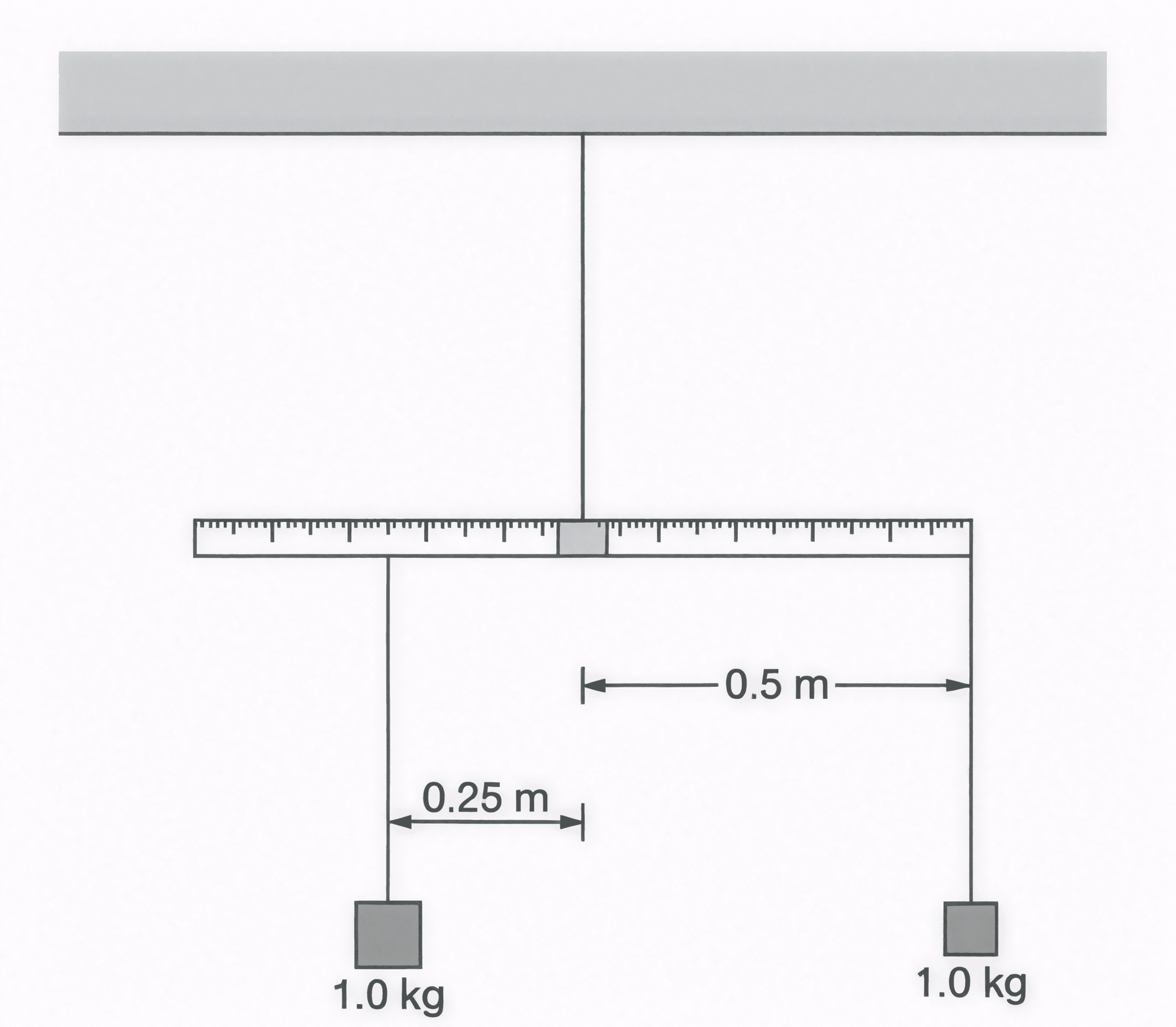
A meterstick is supported at its center, which is aligned with the center of a cradle located at position \( x = 0 \) \( \text{m} \). Two identical objects of mass \( 1.0 \) \( \text{kg} \) are suspended from the meterstick. One object hangs \( 0.25 \) \( \text{m} \) to the left of the support point, and the other object hangs \( 0.50 \) \( \text{m} \) to the right of the support point. The system is released from rest and is free to rotate. Which of the following claims correctly describes the subsequent motion of the system containing the meterstick, cradle, and the two objects?
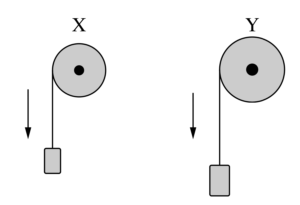
Pulleys \( X \) and \( Y \) are each attached to a block by a string that wraps around the pulley. Both blocks are released and have the same linear acceleration \( a \). As the blocks fall, the pulleys rotate about their centers. Pulley \( Y \) has a larger radius than Pulley \( X \). How does the angular acceleration \( \alpha_X \) of Pulley \( X \) compare to the angular acceleration \( \alpha_Y \) of Pulley \( Y \)?



