
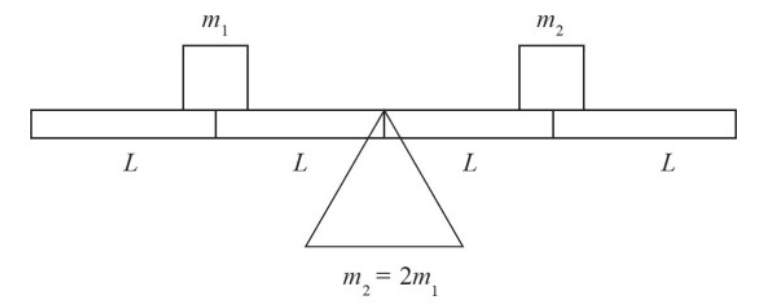
The system above is NOT balanced since \(m_2\) is twice the mass of \(m_1\). Which of the following changes would NOT balance the system so that there is 0 net torque? Assume the plank has no mass of its own.
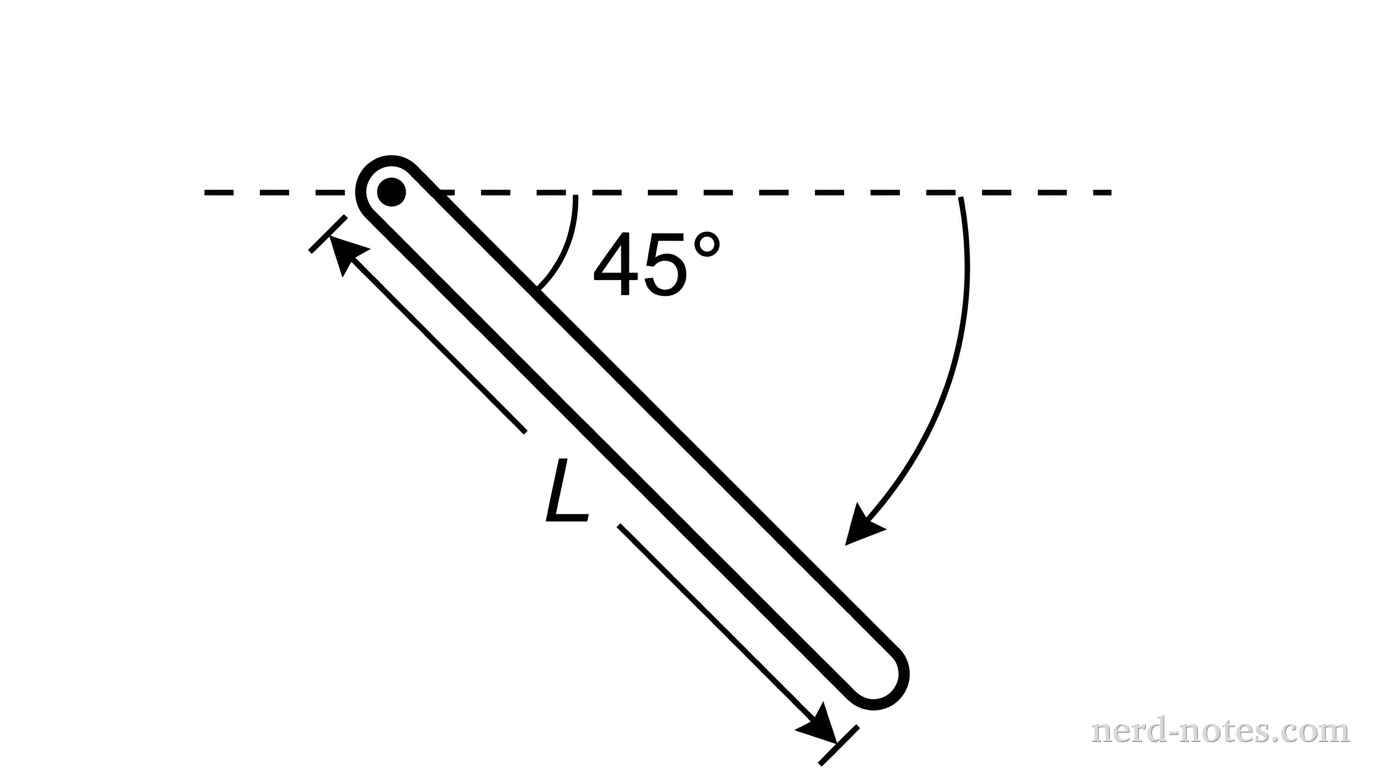
A uniform rod of length \( L \) is pivoted at one end \(45^{\circ}\) below the horizontal and released from rest. The rod swings freely downward. Which of the following best describes the angular acceleration of the rod as it swings from the initial position to the vertical position?
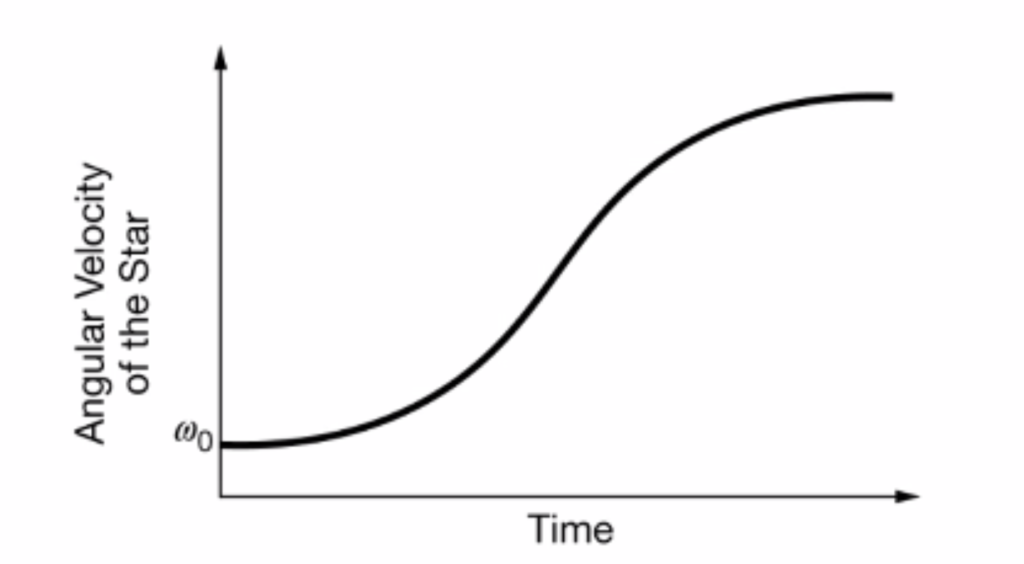
An isolated spherical star of radius \( R_o \), rotates about an axis that passes through its center with an angular velocity of \( \omega_o \). Gravitational forces within the star cause the star’s radius to collapse and decrease to a value \( r_o < R_o \), but the mass of the star remains constant. A graph of the star’s angular velocity as a function of time as it collapses is shown. Which of the following predictions is correct about the angular momentum \( L \) of the star immediately after the collapse?
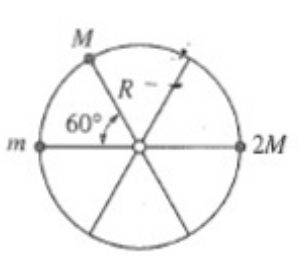
A wheel of radius \( R \) and negligible mass is mounted on a horizontal frictionless axle so that the wheel is in a vertical plane. Three small objects having masses \( m \), \( M \), and \( 2M \), respectively, are mounted on the rim of the wheel, as shown above. If the system is in static equilibrium, what is the value of \( m \) in terms of \( M \)?



