
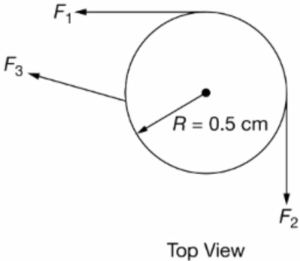
A disk of radius \( R = 0.5 \) \( \text{cm} \) rests on a flat, horizontal surface such that frictional forces are considered to be negligible. Three forces of unknown magnitude are exerted on the edge of the disk, as shown in the figure. Which of the following lists the essential measuring devices that, when used together, are needed to determine the change in angular momentum of the disk after a known time of \( 5.0 \) \( \text{s} \)?
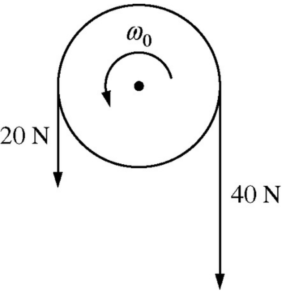
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?
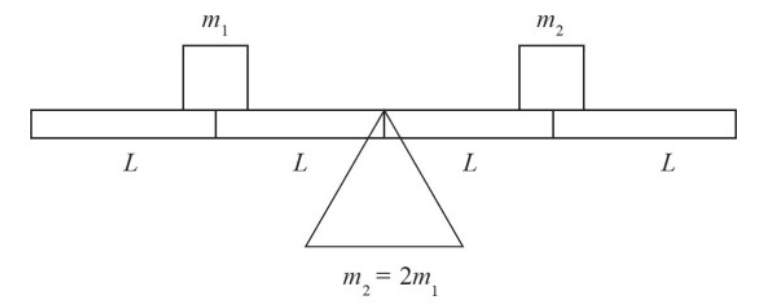
The system above is NOT balanced since \(m_2\) is twice the mass of \(m_1\). Which of the following changes would NOT balance the system so that there is 0 net torque? Assume the plank has no mass of its own.



