
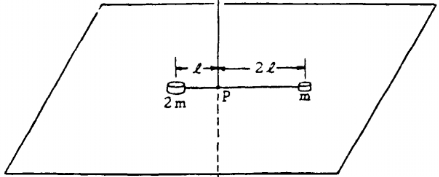
A system consists of two small disks, of masses \( m \) and \( 2m \), attached to a rod of negligible mass of length \( 3l \) as shown above. The rod is free to turn about a vertical axis through point \( P \). The two disks rest on a rough horizontal surface; the coefficient of friction between the disks and the surface is \( \mu \). At time \( t = 0 \), the rod has an initial counterclockwise angular velocity \( \omega_0 \) about \( P \). The system is gradually brought to rest by friction. Develop expressions for the following quantities in terms of \( \mu \), \( m \), \( l \), \( g \), and \( \omega_0 \).

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly
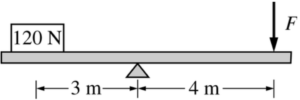
An object weighing 120 N is set on a rigid beam of negligible mass at a distance of 3 m from a pivot, as shown above. A vertical force is to be applied to the other end of the beam a distance of 4 m from the pivot to keep the beam at rest and horizontal. What is the magnitude F of the force required?



