
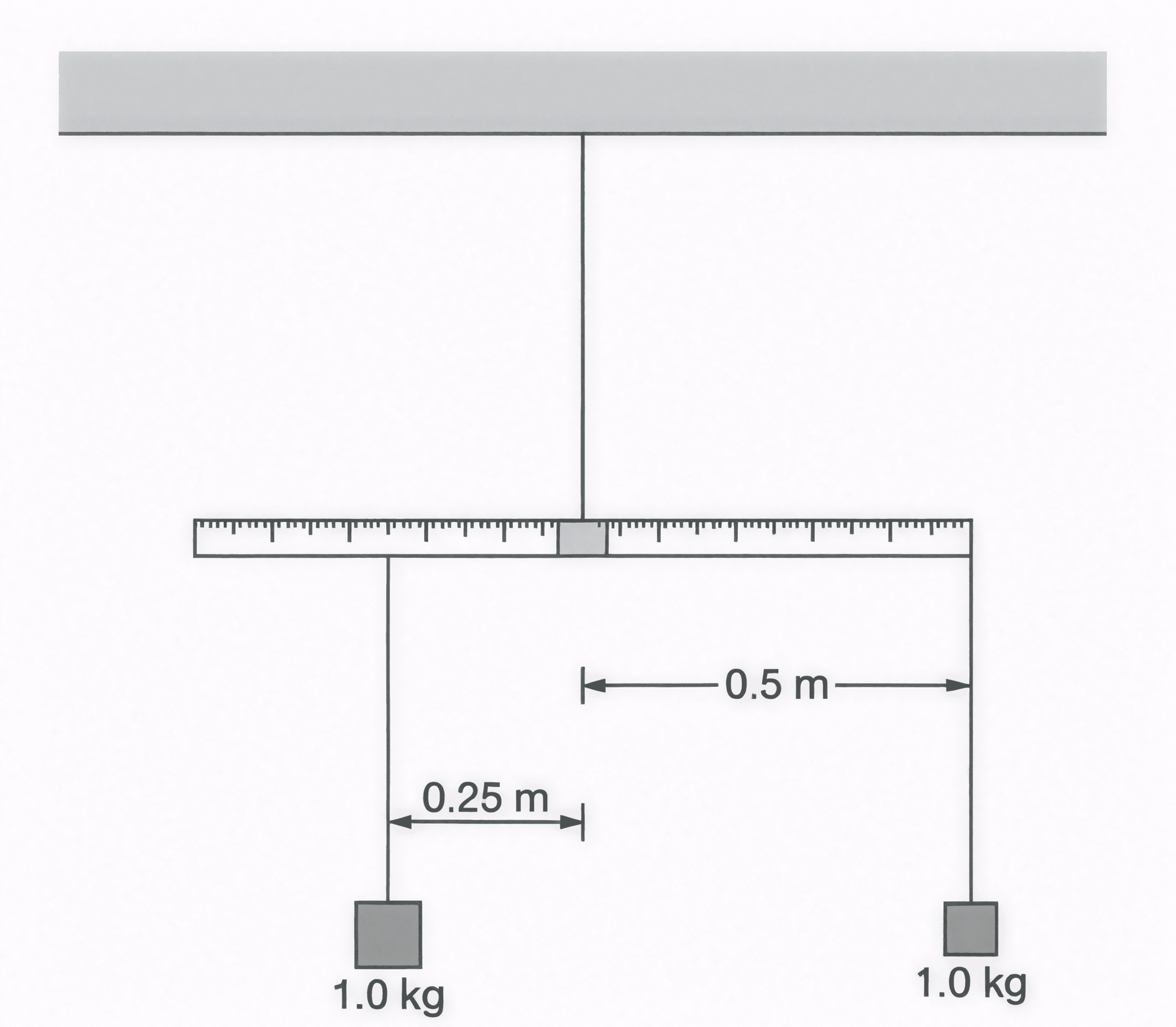
A meterstick is supported at its center, which is aligned with the center of a cradle located at position \( x = 0 \) \( \text{m} \). Two identical objects of mass \( 1.0 \) \( \text{kg} \) are suspended from the meterstick. One object hangs \( 0.25 \) \( \text{m} \) to the left of the support point, and the other object hangs \( 0.50 \) \( \text{m} \) to the right of the support point. The system is released from rest and is free to rotate. Which of the following claims correctly describes the subsequent motion of the system containing the meterstick, cradle, and the two objects?

A sphere starts from rest and rolls down an incline of height \( H = 1.0 \) \( \text{m} \) at an angle of \( 25^\circ \) with the horizontal, as shown above. The radius of the sphere \( R = 15 \) \( \text{cm} \), and its mass \( m = 1.0 \) \( \text{kg} \). The moment of inertia for a sphere is \( \frac{2}{5}mR^2 \). What is the speed of the sphere when it reaches the bottom of the plane?
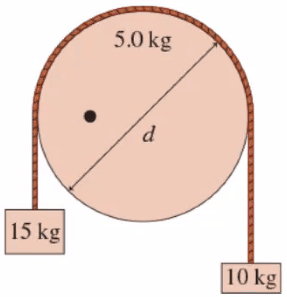
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.



