| Step | Derivation/Formula | Reasoning |
|---|---|---|
| 1 | \[\sum F_{\text{ext},x}=0\] | With no friction between the boat and the water, there is no external horizontal force on the combined system (boat + fisherman). Internal forces (foot-on-boat, boat-on-foot) cancel within the system. |
| 2 | \[a_{\text{CM}}=\frac{\sum F_{\text{ext},x}}{M_{\text{tot}}}=0\] | Zero net external horizontal force implies the center of mass has zero horizontal acceleration. |
| 3 | \[v_{\text{CM}}=\text{constant}\] | If the system starts at rest relative to the water/shore, then \(v_{\text{CM}}=0\) at all times. |
| 4 | \[\Delta x_{\text{CM}}=0\] | With \(v_{\text{CM}}=0\), the center-of-mass position does not change relative to the shore/water while he walks. |
| 5 | \[m_f=m_b\] | The problem states the fisherman’s mass equals the boat’s mass. |
| 6 | \[x_{\text{CM}}=\frac{m_f x_f+m_b x_b}{m_f+m_b}=\frac{x_f+x_b}{2}\] | For two equal masses, the center of mass is the average of their positions (measured relative to the shore/water). |
| 7 | \[\Delta x_{\text{CM}}=\frac{\Delta x_f+\Delta x_b}{2}=0\Rightarrow \Delta x_f=-\Delta x_b\] | Because \(\Delta x_{\text{CM}}=0\), the fisherman’s displacement relative to the water is equal in magnitude and opposite in direction to the boat’s displacement (both displacements measured in the same ground/water frame). |
| 8 | \[\Delta x_{f/b}=\Delta x_f-\Delta x_b=L\] | Let \(L>0\) be how far the fisherman walks toward the shore relative to the boat (from the back toward the front). Relative displacement equals the difference of their ground-frame displacements. |
| 9 | \[\Delta x_f=-\Delta x_b\quad\text{and}\quad\Delta x_f-\Delta x_b=L\Rightarrow 2\Delta x_f=L\Rightarrow \Delta x_f=\frac{L}{2}\] | Combine Step 7 (CM condition) with Step 8 (how far he walked relative to the boat). This shows the fisherman’s displacement relative to the shore/water is \(+L/2\), i.e., he definitely moves closer to the shore. |
| 10 | \[\Delta x_b=-\frac{L}{2}\] | From \(\Delta x_f=-\Delta x_b\), the boat moves away from shore by \(L/2\) while he walks toward shore. |
| 11 | \[\text{Evaluate choices}\] | (a) True: \(\Delta x_f=L/2>0\), so he gets closer to shore. (b) False: he does not get farther. (c) False: \(\Delta x_{\text{CM}}=0\), so CM does not move toward shore. (d) True: CM does not move. (e) True: \(\Delta x_f>0\) means he moves forward relative to the water. |
| 12 | \[\boxed{\text{Correct: (a), (d), (e)}}\] | The fisherman moves shoreward relative to the water (and thus closer to shore), the boat recoils away, and the system’s center of mass stays fixed. |
A Major Upgrade To Phy Is Coming Soon — Stay Tuned

We'll help clarify entire units in one hour or less — guaranteed.
A self paced course with videos, problems sets, and everything you need to get a 5. Trusted by over 15k students and over 200 schools.
A \( 1.0 \)\( \text{-kg} \) object is moving with a velocity of \( 6.0 \) \( \text{m/s} \) to the right. It collides and sticks to a \( 2.0 \)\( \text{-kg} \) object moving with a velocity of \( 3.0 \) \( \text{m/s} \) in the same direction. How much kinetic energy was lost in the collision?
A bullet of mass \(0.0500 \, \text{kg}\) traveling at \(50.0 \, \text{m/s}\) is fired horizontally into a wooden block suspended from a long rope. The mass of the wooden block is \(0.300 \, \text{kg}\) and it is initially at rest. The collision is completely inelastic and after impact the bullet + wooden block move together until the center of mass of the system rises a vertical distance \(h\) above its initial position.
A \(2 \, \text{kg}\) object slides east at \(4 \, \text{m/s}\) and collides with a stationary \(3 \, \text{kg}\) object. After the collision, the \(2 \, \text{kg}\) object is traveling at an unknown velocity at \(15^\circ\) north of east and the \(3 \, \text{kg}\) object is traveling at \(38^\circ\) south of east. What is each object’s final velocity?
If you want to double the momentum of a gas molecule, by what factor must you increase its kinetic energy?
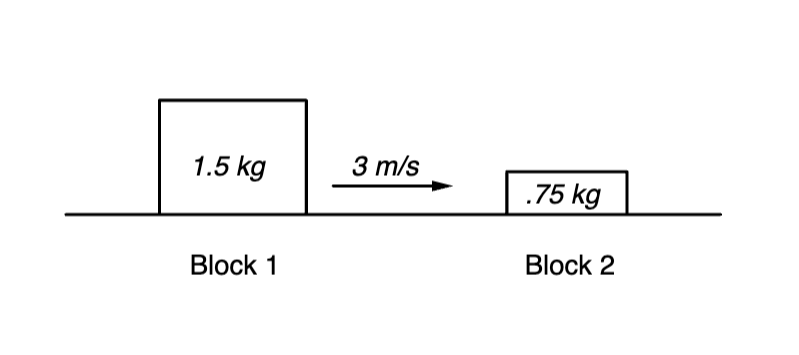
Block 2 initially is at rest. Block 1 travels towards block 2 and collides with Block 2 as shown above. Find the final velocities of both blocks assuming the collision is elastic.
Two identical blocks are connected to the opposite ends of a compressed spring. The blocks initially slide together on a frictionless surface with velocity \( v \) to the right. The spring is then released by remote control. At some later instant, the left block is moving at \( \frac{v}{2} \) to the left, and the other block is moving to the right. What is the speed of the center of mass of the system at that instant?
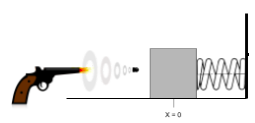
A bullet (mass: \(0.05 \, \text{kg}\)) is fired horizontally (\(v = 200 \, \text{m/s}\)) at a block (mass: \(1.3 \, \text{kg}\)) initially at rest on a frictionless surface. The block is attached to a spring (\(k = 2500 \, \text{N/m}\)). The bullet becomes embedded. Calculate:
A pendulum consists of a mass \( M \) hanging at the bottom end of a massless rod of length \( \ell \) which has a frictionless pivot at its top end. A mass \( m \), moving with velocity \( v \), impacts \( M \) and becomes embedded. In terms of the given variables and constants, what is the smallest value of \( v \) sufficient to cause the pendulum (with embedded mass \( m \)) to swing clear over the top of its arc?
A \(1200 \, \text{kg}\) car moving at \(15.6 \, \text{m/s}\) suddenly collides with a stationary car of mass \(1500 \, \text{kg}\). If the two vehicles lock together, what is their combined velocity immediately after the collision?
A boy of mass \( m \) and a girl of mass \( 2m \) are initially at rest at the center of a frozen pond. They push each other so that she slides to the left at speed \( v \) across the frictionless ice surface and he slides to the right. What is the total work done by the children?
By continuing you (1) agree to our Terms of Use and Terms of Sale and (2) consent to sharing your IP and browser information used by this site’s security protocols as outlined in our Privacy Policy.
| Kinematics | Forces |
|---|---|
| \(\Delta x = v_i t + \frac{1}{2} at^2\) | \(F = ma\) |
| \(v = v_i + at\) | \(F_g = \frac{G m_1 m_2}{r^2}\) |
| \(v^2 = v_i^2 + 2a \Delta x\) | \(f = \mu N\) |
| \(\Delta x = \frac{v_i + v}{2} t\) | \(F_s =-kx\) |
| \(v^2 = v_f^2 \,-\, 2a \Delta x\) |
| Circular Motion | Energy |
|---|---|
| \(F_c = \frac{mv^2}{r}\) | \(KE = \frac{1}{2} mv^2\) |
| \(a_c = \frac{v^2}{r}\) | \(PE = mgh\) |
| \(T = 2\pi \sqrt{\frac{r}{g}}\) | \(KE_i + PE_i = KE_f + PE_f\) |
| \(W = Fd \cos\theta\) |
| Momentum | Torque and Rotations |
|---|---|
| \(p = mv\) | \(\tau = r \cdot F \cdot \sin(\theta)\) |
| \(J = \Delta p\) | \(I = \sum mr^2\) |
| \(p_i = p_f\) | \(L = I \cdot \omega\) |
| Simple Harmonic Motion | Fluids |
|---|---|
| \(F = -kx\) | \(P = \frac{F}{A}\) |
| \(T = 2\pi \sqrt{\frac{l}{g}}\) | \(P_{\text{total}} = P_{\text{atm}} + \rho gh\) |
| \(T = 2\pi \sqrt{\frac{m}{k}}\) | \(Q = Av\) |
| \(x(t) = A \cos(\omega t + \phi)\) | \(F_b = \rho V g\) |
| \(a = -\omega^2 x\) | \(A_1v_1 = A_2v_2\) |
| Constant | Description |
|---|---|
| [katex]g[/katex] | Acceleration due to gravity, typically [katex]9.8 , \text{m/s}^2[/katex] on Earth’s surface |
| [katex]G[/katex] | Universal Gravitational Constant, [katex]6.674 \times 10^{-11} , \text{N} \cdot \text{m}^2/\text{kg}^2[/katex] |
| [katex]\mu_k[/katex] and [katex]\mu_s[/katex] | Coefficients of kinetic ([katex]\mu_k[/katex]) and static ([katex]\mu_s[/katex]) friction, dimensionless. Static friction ([katex]\mu_s[/katex]) is usually greater than kinetic friction ([katex]\mu_k[/katex]) as it resists the start of motion. |
| [katex]k[/katex] | Spring constant, in [katex]\text{N/m}[/katex] |
| [katex] M_E = 5.972 \times 10^{24} , \text{kg} [/katex] | Mass of the Earth |
| [katex] M_M = 7.348 \times 10^{22} , \text{kg} [/katex] | Mass of the Moon |
| [katex] M_M = 1.989 \times 10^{30} , \text{kg} [/katex] | Mass of the Sun |
| Variable | SI Unit |
|---|---|
| [katex]s[/katex] (Displacement) | [katex]\text{meters (m)}[/katex] |
| [katex]v[/katex] (Velocity) | [katex]\text{meters per second (m/s)}[/katex] |
| [katex]a[/katex] (Acceleration) | [katex]\text{meters per second squared (m/s}^2\text{)}[/katex] |
| [katex]t[/katex] (Time) | [katex]\text{seconds (s)}[/katex] |
| [katex]m[/katex] (Mass) | [katex]\text{kilograms (kg)}[/katex] |
| Variable | Derived SI Unit |
|---|---|
| [katex]F[/katex] (Force) | [katex]\text{newtons (N)}[/katex] |
| [katex]E[/katex], [katex]PE[/katex], [katex]KE[/katex] (Energy, Potential Energy, Kinetic Energy) | [katex]\text{joules (J)}[/katex] |
| [katex]P[/katex] (Power) | [katex]\text{watts (W)}[/katex] |
| [katex]p[/katex] (Momentum) | [katex]\text{kilogram meters per second (kgm/s)}[/katex] |
| [katex]\omega[/katex] (Angular Velocity) | [katex]\text{radians per second (rad/s)}[/katex] |
| [katex]\tau[/katex] (Torque) | [katex]\text{newton meters (Nm)}[/katex] |
| [katex]I[/katex] (Moment of Inertia) | [katex]\text{kilogram meter squared (kgm}^2\text{)}[/katex] |
| [katex]f[/katex] (Frequency) | [katex]\text{hertz (Hz)}[/katex] |
Metric Prefixes
Example of using unit analysis: Convert 5 kilometers to millimeters.
Start with the given measurement: [katex]\text{5 km}[/katex]
Use the conversion factors for kilometers to meters and meters to millimeters: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}}[/katex]
Perform the multiplication: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}} = 5 \times 10^3 \times 10^3 \, \text{mm}[/katex]
Simplify to get the final answer: [katex]\boxed{5 \times 10^6 \, \text{mm}}[/katex]
Prefix | Symbol | Power of Ten | Equivalent |
|---|---|---|---|
Pico- | p | [katex]10^{-12}[/katex] | 0.000000000001 |
Nano- | n | [katex]10^{-9}[/katex] | 0.000000001 |
Micro- | µ | [katex]10^{-6}[/katex] | 0.000001 |
Milli- | m | [katex]10^{-3}[/katex] | 0.001 |
Centi- | c | [katex]10^{-2}[/katex] | 0.01 |
Deci- | d | [katex]10^{-1}[/katex] | 0.1 |
(Base unit) | – | [katex]10^{0}[/katex] | 1 |
Deca- or Deka- | da | [katex]10^{1}[/katex] | 10 |
Hecto- | h | [katex]10^{2}[/katex] | 100 |
Kilo- | k | [katex]10^{3}[/katex] | 1,000 |
Mega- | M | [katex]10^{6}[/katex] | 1,000,000 |
Giga- | G | [katex]10^{9}[/katex] | 1,000,000,000 |
Tera- | T | [katex]10^{12}[/katex] | 1,000,000,000,000 |
One price to unlock most advanced version of Phy across all our tools.
per month
Billed Monthly. Cancel Anytime.
Try our free calculator to see what you need to get a 5 on the 2026 AP Physics 1 exam.
A quick explanation
Credits are used to grade your FRQs and GQs. Pro users get unlimited credits.
Submitting counts as 1 attempt.
Viewing answers or explanations count as a failed attempts.
Phy gives partial credit if needed
MCQs and GQs are are 1 point each. FRQs will state points for each part.
Phy customizes problem explanations based on what you struggle with. Just hit the explanation button to see.
Understand you mistakes quicker.

Phy automatically provides feedback so you can improve your responses.
10 Free Credits To Get You Started

By continuing you agree to nerd-notes.com Terms of Service, Privacy Policy, and our usage of user data.
Feeling uneasy about your next physics test? We'll boost your grade in 3 lessons or less—guaranteed

NEW! PHY AI accurately solves all questions
🔥 Get up to 30% off Elite Physics Tutoring
🧠 NEW! Learn Physics From Scratch Self Paced Course
🎯 Need exam style practice questions?
